Wyznaczanie masy bezwładnej i grawitacyjnej
Autorzy: Kamil Felskowski, Bartłomiej Labuda, Rafał Lehmann
(uczniowie I LO w Kartuzach)
Opiekun: Mirosław Regliński (nauczyciel fizyki)
Jesteśmy uczestnikami projektu "Zdolni z Pomorza" w części dotyczącej fizyki. Jednym z zadań realizowanych w trakcie zajęć jest prowadzenie eksperymentów fizycznych i analiza przebiegu zjawisk. Po opublikowaniu przez Izaaka Newtona teorii powszechnego ciążenia jednym z kluczowych problemów fizyki było sprawdzenie czy masa grawitacyjna (źródło pola grawitacyjnego) jest równa masie bezwładnej (charakteryzuje ciała w różnych układach odniesienia).
Zostało nam postawione zadanie: mając do dyspozycji gumę, stoper, miarę, wózek zaprojektuj eksperyment pozwalający sprawdzić, relację między masą grawitacyjną i masą bezwładną. Nasz pomysł był następujący: w pierwszej kolejności należy wyskalować gumę, aby można jej było użyć w przyszłości do określenia wartości siły rozpędzającej wózek. Do wycechowania wykorzystaliśmy masy wzorcowe. Następnie rozpędzaliśmy wózek tak znormalizowaną gumą. Stosując znane prawa fizyczne mogliśmy obliczyć wartość masy grawitacyjnej i bezwładnej na podstawie zebranych danych doświadczalnych. Na koniec przystąpiliśmy do analizy czynników mogących zakłócić dokładność pomiaru oraz obliczyliśmy wartość niepewności pomiarowej, którą obarczone były uzyskane wyniki.
Poniżej przedstawiamy wyniki naszego eksperymentu.
W pierwszej kolejności wyznaczyliśmy długość gumy zastosowanej jako źródło siły rozpędzającej ciało, którego masę grawitacyjną i bezwładną badaliśmy. Pomiary prowadziliśmy wielokrotnie aby wykluczyć przypadkowe błędy i wyznaczoną wartością długości maksymalnie przybliżyć się do jej wartości rzeczywistej.
| Lp. | lo [m] |
| 1 | 0,663 |
| 2 | 0,665 |
| 3 | 0,662 |
| 4 | 0,664 |
| 5 | 0,667 |
| 6 | 0,666 |
| 7 | 0,669 |
| 8 | 0,663 |
Średnia wartość długości gumy wyniosła lo = 0,665±0,002m. Natomiast odchylenie standardowe z prób (czyli miara niepewności przypadkowej pojedynczego pomiaru) wyniosła ±0,003m. Stosunkowo mała wartość odchylenia wskazuje na małe rozproszenie otrzymanych wyników pomiarowych, czyli że zmierzone długości są bliskie jej wartości rzeczywistej.
Rachunki przeprowadziliśmy w oparciu o równanie na odchylenie standardowe z prób, Poziom istotności określany przez współczynnik α, przyjęliśmy na poziomie 0,3174, co oznacza, że w przedziale określonym przez wyznaczone odchylenie standardowe będzie zawierało się 68,3% wyników.
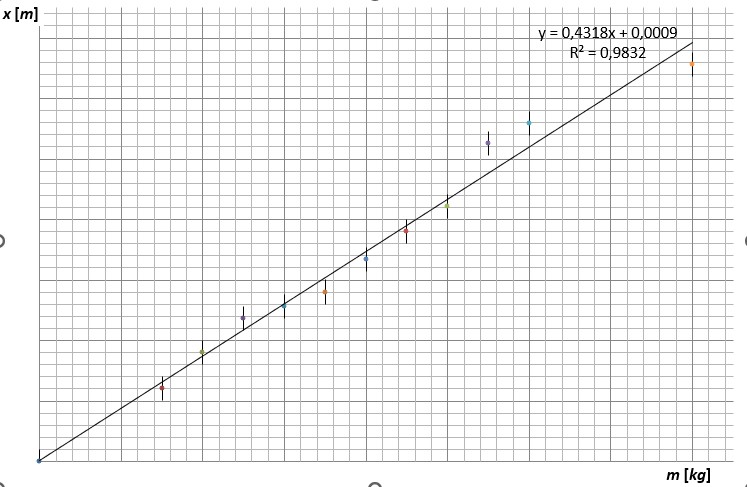
Po wyznaczeniu długości gumy mogliśmy przystąpić do jej wycechowania przez znalezienie zależności między wartością podwieszonej masy i wydłużeniem sprężyny spowodowanym oddziaływaniem grawitacyjnym badanej masy z Ziemią. Odkształceń dokonywaliśmy w ograniczonym przedziale tak aby nie przekroczyć zakresu stosowalności
prawa Hook'a. W tym celu podwieszaliśmy ciała o znanych masach grawitacyjnych odnotowując za każdym razem długość gumy.
| Lp. | m [kg] | lk [m] | x = lk - lo [m] |
| 1 | 0,00 | 0,665 | 0,000 |
| 2 | 0,15 | 0,725 | 0,060 |
| 3 | 0,20 | 0,755 | 0,090 |
| 4 | 0,25 | 0,783 | 0,118 |
| 5 | 0,30 | 0,793 | 0,128 |
| 6 | 0,35 | 0,805 | 0,140 |
| 7 | 0,40 | 0,832 | 0,167 |
| 8 | 0,45 | 0,855 | 0,190 |
| 9 | 0,50 | 0,876 | 0,211 |
| 10 | 0,55 | 0,928 | 0,263 |
| 11 | 0,60 | 0,944 | 0,279 |
| 12 | 0,80 | 0,993 | 0,328 |
Jak widać z danych zawartych w tabeli, a przede wszystkim z wykresu przedstawiającego zależność odkształcenia od podwieszonej masy, poruszaliśmy się w obszarze stosowalności prawa Hooke'a (funkcja liniowa).
Dysponując powyższym wykresem mogliśmy odczytać wartość masy grawitacyjnej badanego ciała na podstawie średniej wartości wydłużenia gumy spowodowanego oddziaływaniem grawitacyjnym badanej masy z Ziemią. Aby uzyskać taką informację, wielokrotnie zawieszaliśmy wózek na gumie by zgromadzić kilka odczytów i na ich podstawie wyznaczyć średnią wartość wydłużenia. Średnia wartość wydłużenia wyniosła 0,193m. Co odpowiada podwieszeniu masy 0,440kg - odczyt z wykresu. Dane na podstawie których została odczytana wartość masy wózka są zawarte w tabeli.
| Lp. | lw [m] | xw = lw - lo [m] |
| 1 | 0,847 | 0,182 |
| 2 | 0,849 | 0,184 |
| 3 | 0,849 | 0,184 |
| 4 | 0,852 | 0,187 |
| 5 | 0,865 | 0,200 |
| 6 | 0,866 | 0,201 |
| 7 | 0,866 | 0,201 |
| 8 | 0,868 | 0,203 |
Z tego względu, że wydłużenie xw jest funkcją zależną od pomiaru dwóch wielkości fizycznych (lw i lo), niepewność wyznaczenia tej wielkości jest sumą niepewności pomiaru wielkości składowych (różniczka zupełna)
co daje wynik ±0,010m. Otrzymana wartość jest bardzo istotna ponieważ to ona decyduje o dokładności odczytania wartości masy grawitacyjnej z wykonanego wykresu. Wynika z tego, że wyznaczyliśmy masę grawitacyjną popełniając niepewność maksymalną ∆mg = ±0,023kg.
Natomiast odchylenie standardowe dla średniej arytmetycznej wyznaczonej masy grawitacyjnej wynosi ±0,008kg. Niewielka wartość odchylenia standardowego od średniej ("około 2%) świadczy o tym, że wartość wyznaczonej masy grawitacyjnej ma bardzo małe rozproszenie. Zatem prawdopodobieństwo, że rzeczywista wartość masy grawitacyjnej wyznaczonej w tym eksperymencie zawiera się w przedziale od 0,432kg do 0,448kg jest bardzo duże.
Dysponując wartością masy grawitacyjnej przystąpiliśmy do wyznaczenia masy bezwładnej wózka, by w końcowym etapie eksperymentu móc porównać wartości mas. W tym celu musieliśmy wyznaczyć wartość współczynnika sprężystości k. Po narysowaniu linii najlepszego dopasowania do trendu, jaki wskazywały punkty pomiarowe ustaliliśmy, że wartość k = 22,67N/m. Oczywiście wartość tej wielkości była obarczona niepewnością pomiarową wynikającą z precyzji wyznaczenia długości odkształcanej gumy (niepewność maksymalna wyznaczenia x, wynosi ±0,010m). W związku ze spełnieniem prawa Hooke'a (F = kx) otrzymujemy maksymalną niepewność współczynnika sprężystości:
W związku z tym niepewność maksymalna współczynnika sprężystości wynosi: ±1,62N/m . Ze względu na zastosowanie mas wzorcowych założyliśmy, że ich wartość nie jest obarczona niepewnością w związku z tym niepewność siły odpowiedzialnej za wydłużenie gumy także została pominięta jako zaniedbywalnie mała.
Odchylenie standardowe policzyliśmy stosując prawo przenoszenia odchyleń standardowych:
Po przeprowadzeniu rachunków otrzymaliśmy, że odchylenie standardowe dla wartości średniej współczynnika sprężystości jest równe: ±0,42N/m. Otrzymana wartość odchylenia standardowego wskazuje na to, że niepewność przypadkowa średniej arytmetycznej k jest mała i pozwala przyjąć, że rzeczywista wartość k jest zawarta w przedziale od 22,25N/m do 23,09 N/m. Dokładność wyznaczenia tego parametru jest kluczowa w eksperymencie, gdyż od niej zależy dokładność wyznaczenia wartości masy bezwładnej. Uzyskany wynik pozwala sądzić, że parametry gumy nie będą przeszkodą w uzyskaniu dobrego rezultatu końcowego w eksperymencie.
Masę bezwładną wyznaczyliśmy mierząc czas ruchu wózka na znanym odcinku drogi (od momentu zakończenia odkształcenia gumy). Aby móc skorzystać z zasady zachowania energii mechanicznej musieliśmy zdecydowanie ograniczyć długość drogi. Dzięki temu mogliśmy przyjąć, że wpływ sił tarcia jest pomijalnie mały - ruch wózka badaliśmy na odcinku 1,000m. Z drugiej strony długość odcinka nie może być zbyt mała, ponieważ czas trwania ruchu jest wtedy zbyt krótki i pomiar czasu byłby obarczony zbyt dużą niepewnością ze względu na refleks człowieka. Z tego samego powodu gumę odkształcaliśmy o niewielką wartość (około 10cm) aby wartość przyspieszenia nie była zbyt duża (duża prędkość i krótki czas ruchu), a z drugiej strony była zawarta w zakresie najlepszej zgodności z prawem Hooke'a. Do pomiaru czasu stosowaliśmy stoper telefonu komórkowego, pracujący z dokładnością ±0,01s. Pomiary powtarzaliśmy wielokrotnie, aby zminimalizować wartość niepewności. Serię pomiarową czasu dla wydłużenia 0,200m pominęliśmy w analizie ze względu na obawę, że będzie on wyznaczony nie dokładnie ze względu na jego małą wartość (czynnik fizjologiczny). Średni czas ruchu wózka po torze długości 1m wyniósł 1,40s.
| x [m] | t [s] | tśr [s] | |||
| 0,200 | 0,68 | 0,71 | 0,71 | 0,68 | 0,70 |
| 0,100 | 1,32 | 1,40 | 1,41 | 1,37 | 1,38 |
| 0,100 | 1,40 | 1,52 | 1,39 | 1,31 | 1,41 |
| 0,100 | 1,51 | 1,55 | 1,39 | 1,52 | 1,49 |
| 0,100 | 1,40 | 1,38 | 1,61 | 1,42 | 1,45 |
| 0,100 | 1,30 | 1,42 | 1,40 | 1,38 | 1,38 |
| 0,100 | 1,36 | 1,41 | 1,39 | 1,40 | 1,39 |
| 0,100 | 1,22 | 1,41 | 1,39 | 1,41 | 1,36 |
| 0,100 | 1,32 | 1,50 | 1,33 | 1,55 | 1,43 |
| 0,100 | 1,28 | 1,39 | 1,51 | 1,41 | 1,40 |
| 0,100 | 1,45 | 1,42 | 1,31 | 1,29 | 1,37 |
| 0,100 | 1,42 | 1,43 | 1,33 | 1,36 | 1,39 |
| 0,100 | 1,38 | 1,45 | 1,52 | 1,31 | 1,42 |
Do wyznaczenia masy bezwładnej, wykorzystujemy zasadę zachowania energii mechanicznej - energia sprężystości zostaje całkowicie zamieniona w energię kinetyczną. Dzięki temu, że pomiar czasu rozpoczynaliśmy w chwili gdy guma uległa całkowitemu rozprężeniu mieliśmy pewność, że energia potencjalna sprężystości w całości została zamieniona na energię kinetyczną, a wózek od tego momentu zaczął poruszać się ruchem jednostajnym prostoliniowym.
po przekształceniu, otrzymujemy
Po podstawieniu danych pomiarowych otrzymaliśmy średnią wartość masy bezwładnej mb = 0,446kg.
Jak wynika z otrzymanego równania, aby wyznaczyć wartość masy bezwładnej należało zmierzyć kilka wielkości. Z tego powodu obliczenie niepewności maksymalna wymaga uwzględnienia wpływu, tych wielkości wyznaczanych w pomiarach bezpośrednich lub obliczanych na podstawie innych pomiarów. Z tego powodu równanie na niepewność maksymalną masy bezwładnej przyjmie postać:
+
Po obliczeniu pochodnych cząstkowych i podstawieniu danych pomiarowych oraz wcześniej wyznaczonych niepewności dla wielkości w bezpośrednim pomiarze, otrzymujemy maksymalną niepewność pomiarową dla masy bezwładnej:
∆mb = ±0,057kg
Odchylenie standardowe wartości średniej masy bezwładnej wynosi:
∆mbs = ±0,014kg
Otrzymana wartość maksymalnej niepewności pomiarowej jest dwa razy większa niż w przypadku niepewności wyznaczenia masy grawitacyjnej. Należy jednak pamiętać, że w celu wyznaczenia masy bezwładnej należało dokonać kilku niezależnych pomiarów, które nakładając się na siebie spowodowały spadek dokładności wyznaczenia tej masy. Jednak jeżeli weźmiemy pod uwagę środki techniczne jakimi dysponowaliśmy, to uzyskany wynik oprócz wartości poznawczej ma także wartość merytoryczną. W pierwszym przypadku gdy wyznaczaliśmy masę grawitacyjną względna maksymalna niepewność pomiarowa wyniosła 5,23%, natomiast przy wyznaczaniu masy bezwładnej jej wartość osiągnęła 12,81%. Jeżeli porównamy przedziały, w których zawierają się badane masy (uwzględniając odchylenie
standardowe), to dla masy grawitacyjnej , natomiast w przypadku masy bezwładnej . Jeżeli poszerzymy przedział ufności do wartości maksymalnej niepewności dla masy grawitacyjnej to jej rzeczywista wartość będzie się w nim zawierała z prawdopodobieństwem 98,3% (odczyt wartości krytycznej tα,n = 3,0520 dla
8 pomiarów - czerwona linia). Stosując ten sam przedział ufności dla masy bezwładnej, zatem zawężając w stosunku do niepewności maksymalnej otrzymujemy (odczyt wartości krytycznej tα,n = 3,1858 dla 12 pomiarów - niebieska linia) prawdopodobieństwo zawarcia w tym przedziale rzeczywistej wartości masy bezwładnej wynosi 98,8%.
|
Jak widać z tego porównania przedział niepewności wyznaczenia masy grawitacyjnej w całości mieści się w przedziale niepewności wyznaczenia masy bezwładnej ponadto prawdopodobieństwa znalezienia wartości rzeczywistych tych mas są w przedziałach o tej samej wartości równe. W związku z tym, że wystąpiła pełna zgodność wartości wyznaczanych wielkości i przedziałów niepewności pomiarowych uważamy, że udowodniliśmy, iż masa grawitacyjna jest równa co do wartości masie bezwładnej. Oszacowane maksymalne przedziały niepewności pomiarowych można by zawęzić stosując wycechowane w powołanych do tego instytucjach elementy sprężyste, zdecydowanie dłuższy tor ruchu wózka oraz elektroniczny miernik czasu. W naszym przypadku idea pomiaru wymagała, aby minimalnym nakładem środków wykonać kluczowy dla fizyki eksperyment.
 |
Gdyby okazało się, że nie jest prawdą równość obu mas to analizując zjawiska z zakresu grawitacji musielibyśmy stosować w równaniach masę grawitacyjną, a w problemach z dynamiki masę bezwładną. Jednak co zrobić w przypadku gdy badamy ruch satelity na orbicie, gdzie z jednej strony mielibyśmy masę grawitacyjną (siła powszechnego ciążenia), a z drugiej masę bezwładną (siła bezwładności) i masy te nie byłyby równe?